Rintaroh Shima
Welcome to my portfolio!
Semantic Mapping for Wheelchair Navigation
December 06, 2023
Created a mapping system that allows power wheelchair users to view, save, and autonomously navigate to semantically-identified landmarks using a tablet.
Stereo Visual Odometry
September 22, 2023
Developed a stereo camera-based visual odometry system to estimate the motion of a vehicle.
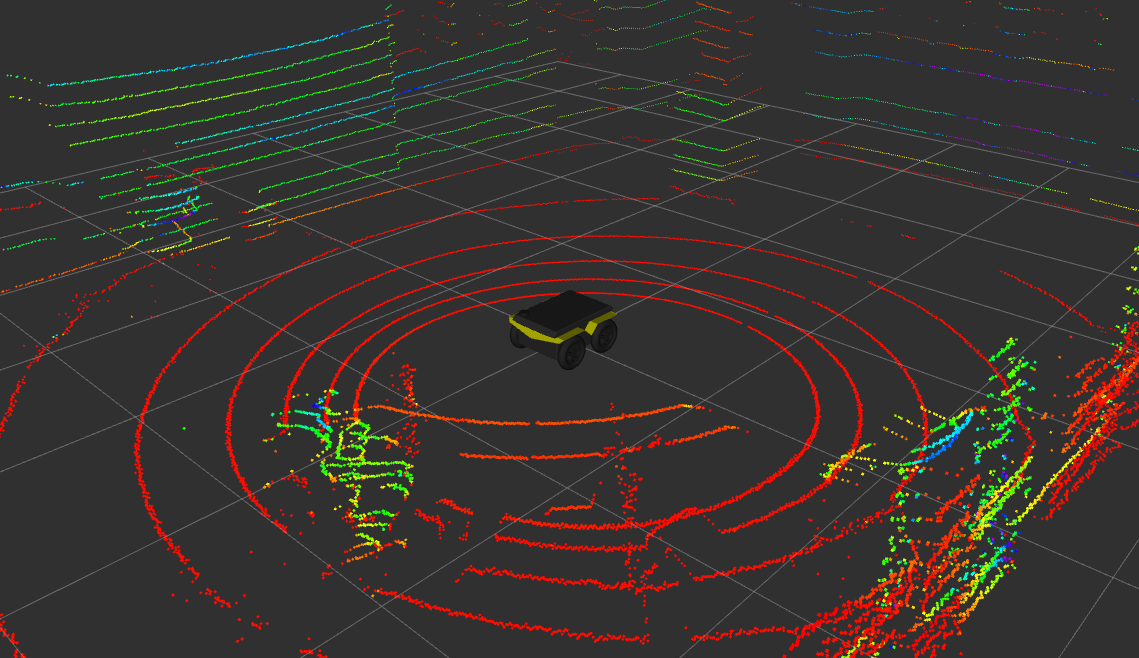
3D SLAM and Object Detection for Jackal Navigation
March 15, 2023
Implemented 3D SLAM, autonomous navigation, and real-time object detection on the Clearpath Jackal UGV. Performed point cloud processing to remove unnecessary LiDAR points.
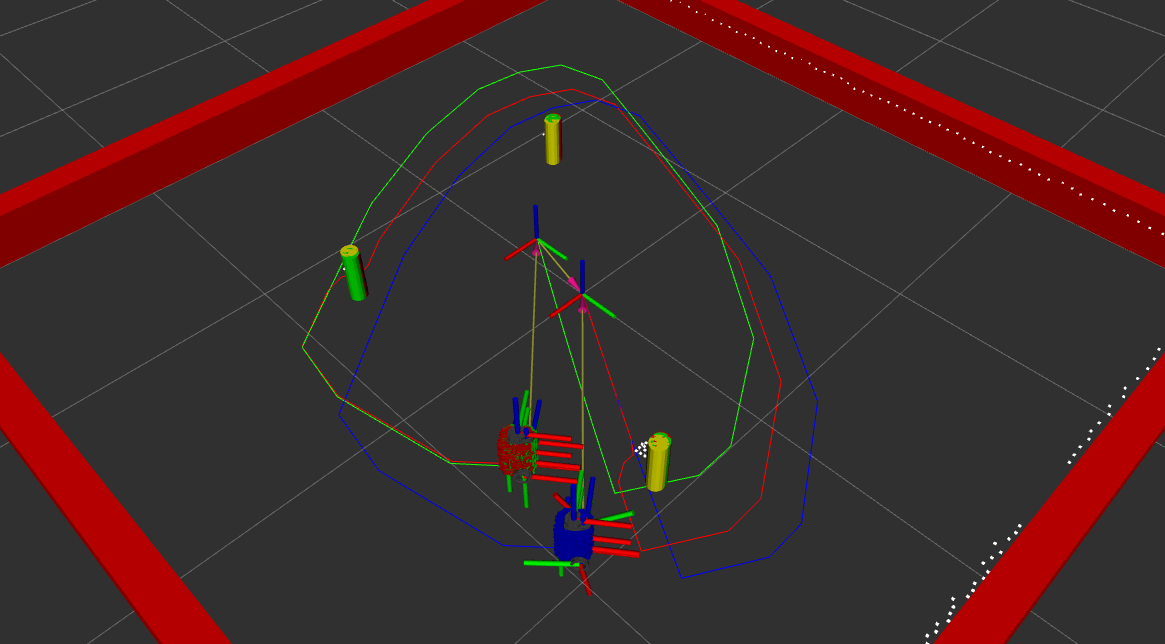
Extended Kalman Filter SLAM from Scratch
March 13, 2023
Developed several ROS 2 packages and a C++ library to implement Extended Kalman Filter SLAM on a TurtleBot3 in simulation.

Balloon Volleyball with a 7-DOF Robot Arm
January 02, 2023
Collaborated with four other students to recreate the game “Don’t let the balloon touch the ground” with a Franka Emika Panda robot.